随着工业智造的快速发展,传感器技术作为工业自动化和机器人领域的重要支撑,正逐渐成为推动产业升级的核心技术之一。
其中,六维力传感器作为一种能够同时测量力和力矩的高精度传感器,因其广泛的应用场景和独特的技术优势,正成为智能制造领域的重要工具。特别是在近年来人形机器人、协作机器人和智能装配等领域的快速发展,使得六维力传感器的应用前景更加广阔。
六维力传感器:解锁机器人感知新维度
六维力传感器是集力和力矩测量于一体的高精度传感器,能够同时检测X、Y、Z三个方向的力和绕这三个轴的力矩,为机器人提供多维度的力觉感知能力。在智能制造中,六维力传感器能够实时监测机器人与环境或物体之间的相互作用力,帮助机器人实现更精准的动作控制和更复杂的操作任务。
六维力传感器的核心技术与优势:
1.高灵敏度与高精度:六维力传感器能够感知微小的力和力矩变化,可达克级力控精度,满足机器人精细操作的需求。
2.快速响应:传感器能够实时反馈力和力矩信息,帮助机器人在动态环境中快速调整动作。
3.长寿命与可靠性:通过精密制造和优化设计,六维力传感器能够在恶劣环境下长期稳定工作,适应工业和机器人领域的高强度应用。
4.集成化与小型化:现代六维力传感器设计更加紧凑,便于集成到机器人手部、脚部、关节等关键部位,同时不影响机器人整体性能。
六维力传感器的关键技术主要集中在技术实现、性能优化、应用集成等方面,具体包括:
1.动态响应能力:六维力传感器需要快速准确地响应动态力变化,如机器人打磨抛光时的接触力或物体高速运动过程中的称重。
2.全方位机械过载保护:为避免传感器在受到超量程力作用时损坏,需要设计有效的过载保护结构,这在技术上具有挑战性。
3.温度漂移和稳定性控制:传感器必须具备良好的温度补偿机制,以减少温度变化对测量结果的影响,并保持长期稳定性。
4.多通道信号处理:六维力传感器需要同时处理多个方向的力和力矩信号,这要求高度精确的信号采集和处理技术。
5.交叉干扰和耦合误差:在多维力传感器中,不同方向的力和力矩之间可能存在耦合,需要通过精确的解耦算法来分离这些信号。一般说来,降低耦合干扰的两种途径:结构解耦、算法解耦。结构解耦和算法解耦通常需要结合使用,以实现最佳的解耦效果。结构解耦可以减少耦合效应,降低算法解耦的难度;而算法解耦可以进一步校正结构解耦难以消除的耦合干扰,提高测量精度。
6.标定和校准技术:六维力传感器需要通过复杂的标定和校准过程来确保测量精度,这通常涉及到精确的测试设备和方法。
7.传感器融合:在某些应用中,需要将力传感器与其他类型的传感器(如位置、速度、加速度传感器)相结合,解决不同传感器之间数据融合的技术难题。
8.材料选择和加工工艺:选择合适的材料并优化其性能是技术难点之一,同时,力传感器的生产涉及精密的加工工艺。
9.小型化和轻量化:在保持性能的前提下,减小传感器的体积和重量,以适应空间受限的应用场合。
10.实时数据处理:开发高效的数据处理算法,以实现实时或近实时的数据处理和反馈。
11.长期稳定性和可靠性:传感器需要在各种环境条件下保持长期稳定工作,材料老化和疲劳寿命是设计时需要考虑的因素。
12.成本控制:在保证技术性能的同时,如何有效控制力传感器的生产成本,是实现传感器商业化的关键。
13.精度和分辨率:六维力传感器需要具备高测量精度和分辨率,以满足高精度应用的需求。
14.系统集成:将六维力传感器集成到机器人或其他自动化系统中,需要解决机械设计、电子接口和软件兼容性等问题。
人形机器人:六维力传感器的典型应用场景
人形机器人作为人工智能与机器人技术的前沿领域,近年来迎来了爆发式增长。2025年,随着多家知名科技公司推出新一代人形机器人产品,这一领域成为全球科技行业的焦点。六维力传感器在人形机器人中的应用,赋予了机器人更强大的力觉感知能力,使其能够完成复杂且精细的操作任务。
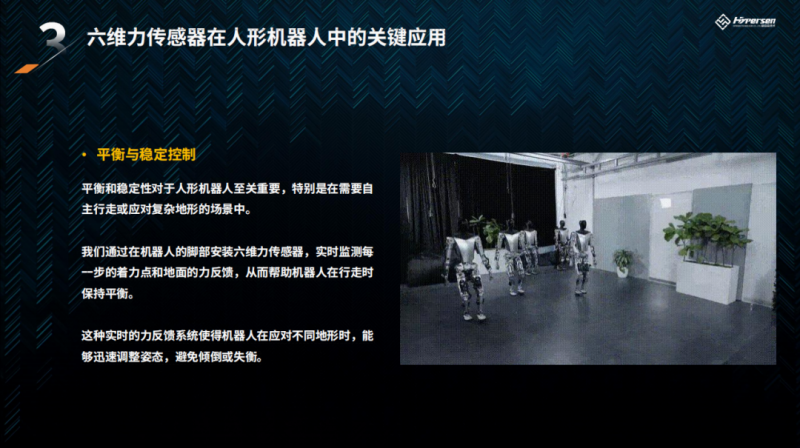
在人形机器人的应用中,六维力传感器能够实时监测机器人与环境或物体之间的力和力矩变化,帮助机器人实现更自然的交互和动作控制。例如,在抓取物体时,传感器能够感知物体的重量和形状,从而调整握力和动作。在人形机器人行走或进行高难度动作时,六维力传感器能够监测脚部和关节的力矩变化,帮助机器人保持平衡和稳定。此外,六维力传感器的高精度特性,使得机器人能够完成如精密装配、医疗手术等高难度任务。

人形机器人领域,六维力传感器已成为高性能人形机器人的标配,通常安装在手腕、脚腕、足底或手部,在运控规划、姿态调整、力度感知等中起到重要作用,以提升手部操作的灵活性以及脚部行走的稳定性,提升人形机器人在复杂环境中的自主性和适应性,可以实现在碎石、地砖、草坪、厚地、草坪等不平整地面上稳定快速行走,通过全新的脚掌姿态控制算法以及柔性自适应多种地面。
目前特斯拉Optimus、优必选Walker X、达闼科技的小紫XR-4、本田ASIMO、美国宇航局的Valkyrie等,都已采用六维力传感器来提升机器人的性能。
以下是六维力传感器在人形机器人中的一些关键应用和安装位置:
● 手腕部位:六维力传感器安装在手腕部位,可以帮助机器人实现精细的手部操作,如抓握、搬运和装配等任务。
● 脚腕、足底:在脚腕或足底安装六维力传感器,有助于机器人在行走和平衡控制中感知地面的反作用力,以便机器人控制系统可以调整人形机器人手臂和身体的姿态,提高行走稳定性。
● 手部接触点:在机器人手部的接触点安装六维力传感器,可以提升手部操作的灵活性和适应性,特别是在需要柔顺控制的场景中。
● 运控规划:六维力传感器提供的数据对于机器人的运动控制规划至关重要,它们可以帮助机器人更好地规划动作,避免碰撞和损伤。
● 姿态调整:在机器人的姿态调整过程中,六维力传感器可以提供必要的反馈信息,帮助机器人保持平衡和稳定。
● 力度感知:六维力传感器使机器人能够感知与外界物体交互时的力度,这对于需要精确控制力度的应用非常重要。
国产替代与国际市场:六维力传感器的崛起
在2025年3月31日的深圳国际传感器展会上,海伯森技术(深圳)有限公司销售总监单永川发表了专题演讲《国产替代 走向世界 六维力传感器助力人形机器人产业发展》,吸引了众多行业专家和观众的关注。

海伯森通过创新设计和精密制造,实现了传感器的高灵敏度与长寿命,为机器人的力觉感知系统提供了可靠的技术支撑。
海伯森的传感器产品已通过多项国际认证,标志着其技术实力已达到国际先进水平。在国家政策的支持下,国产传感器企业如海伯森等正在快速崛起,填补高端传感器市场的空白。凭借高性价比和技术突破,国产六维力传感器正在加速替代进口产品,为智能制造提供更可靠的技术保障,达到精细操作的目标。
作为国内传感器领域的先行者,海伯森将继续发挥技术优势,推动六维力传感器在更多领域的应用。通过与机器人企业的深度合作,海伯森致力于为中国智造走向世界提供强有力的技术支撑。
未来展望:六维力传感器与人形机器人协同发展
未来,六维力传感器将朝着高精度、智能化、小型化和集成化方向发展,成为智能制造不可或缺的核心技术之一。特别是在人形机器人领域,六维力传感器的应用将更加广泛,助力机器人实现更复杂、更精细的操作任务。
通过人工智能算法,六维力传感器将能够实时分析力和力矩数据,提供更智能的控制策略。随着制造工艺的进步,六维力传感器将更加轻便、紧凑,便于集成到更多类型的机器人中。除了工业机器人和人形机器人,六维力传感器还将在医疗机器人、服务机器人、航空航天等领域发挥重要作用。
六维力传感器与人形机器人技术的协同发展,不仅推动了智能制造的升级,也为机器人智能化发展注入了更强动力。随着国产传感器企业的快速崛起和技术创新,中国在全球传感器和机器人市场中将占据更重要的地位。未来,六维力传感器将成为机器人感知系统的核心技术之一,助力中国智造走向世界。